{kind=link}
{kind=link}
{kind=link}
Distributed event-triggered consensus tracking of second-order multi-agent systems with a virtual leader
[Cao Jie, Wu Zhi-Hai†,  , Peng Li]
, Peng Li]
, Peng Li]
|
|


† Corresponding author. E-mail:
Project supported by the National Natural Science Foundation of China (Grant Nos. 61203147, 61374047, and 61403168).
This paper investigates the consensus tracking problems of second-order multi-agent systems with a virtual leader via event-triggered control. A novel distributed event-triggered transmission scheme is proposed, which is intermittently examined at constant sampling instants. Only partial neighbor information and local measurements are required for event detection. Then the corresponding event-triggered consensus tracking protocol is presented to guarantee second-order multi-agent systems to achieve consensus tracking. Numerical simulations are given to illustrate the effectiveness of the proposed strategy.
In the last decade, synthesis and analysis of multi-agent systems have been extensively investigated by various researchers from multiple disciplines due to their broad applications, including swarming, flocking,[1] formation, target pursuit,[2,3] synchronization,[4] automated highway systems, distributed sensor networks, cooperative control of unmanned air vehicles, congestion control in communication networks, and so on. As one of the basic issues in the distributed coordination control of multi-agent systems, consensus is to design an appropriate control protocol for each agent such that the whole system can ultimately reach an agreement.[5–12]
Along with the progress in computer technology, an agent may be equipped with an embedded microprocessor to access information and update the control input. However, since the power supply of an agent is constrained, it is urgent for researchers to devise a proper consensus algorithm for multi-agent systems such that the energy consumption can be further reduced while the control performance is guaranteed. From this respect, two alternatives are in consideration to make the control updating more efficient. A traditional method is the time-triggered control, in which the control execution and information transmission are periodic. Although this approach is effective for energy saving to some extent, the sampling period is often chosen according to the worst-case scenario, which may lead to unnecessary energy waste. Motivated by this conflict, the event-triggered strategy has been subsequently proposed. In event-triggered fashion, controller actuation only happens at some specific instants rather than continuously or in a periodic pattern. These specific instants are determined by a predefined event condition, e.g., the error exceeds a specific threshold. It was shown in Ref. [10] that the event-triggered control outperforms the time-triggered control in many aspects.
Recently, there has been a remarkable rise in the amount of results on event-triggered control of networked control systems and wireless networks.[13–17] This framework has been proved to be applicable for multi-agent systems in Ref. [18]. Based on the idea of feedback, Dimos et al. proposed both centralized and distributed event-triggered strategies for each agent to determine the control updates. In Ref. [19], Garcia et al. revised the event condition to avoid continuous communication on the basis of the results in Ref. [18]. Two novel event-based control strategies applying a time-dependent event detector for average consensus of single-integrator and double-integrator multi-agent systems were presented in Ref. [20]. In Ref. [21], Fan et al. considered the event-triggered consensus problems of the first-order multi-agent systems, where the event condition involves combinational measurements to further reduce the controller actuation. In Ref. [22], a novel event-based control algorithm was proposed to solve the consensus problem of multi-agent systems with switching topologies, in which the event condition is distributed and sampled.
In essence, the focus of event condition contains two factors: lower frequency of control updating and less information transmission among agents. However, when it comes to a consensus tracking case, conditions are more complicated than those in the average consensus case. Recently, there were some studies on event-triggered consensus tracking of multi-agent systems. In Ref. [23], the consensus tracking problems in multi-agent systems with and without communication delays were considered, where the follower and the leader are assumed to be a single-integrator and a double-integrator, respectively. In Ref. [24], a distributed event-triggered control strategy for the second-order multi-agent systems was proposed, where the control input incorporates continuous measurement of the leader. In Ref. [25], an event-triggered strategy and a distributed estimation were proposed for the dynamic tracking control of the second-order multi-agent systems, where the communication among agents needs to be carried out constantly. In Ref. [26], Li et al considered the event-triggered consensus tracking of the second-order multi-agent systems with fixed and switching topologies, where the high-frequency control updating happens if the states of the agents are close.
In the above references[23–26] about event-triggered consensus tracking of multi-agent systems, there is a common fact that the event condition is assumed to be continuously examined, which implies a great amount of energy waste. Motivated by this observation, we propose a novel distributed event-triggered consensus tracking strategy, where continuous information is replaced with sampled data in event detection for lower communication. It is shown that the parameters of the event condition can be selected such that the second-order multi-agent systems achieve consensus tracking.
The remainder of this paper is organized as follows. Section 2 briefly introduces some concepts in algebraic graph theory and states the problem. Section 3 presents convergence analysis of the event-triggered consensus tracking protocol. In Section 4, numerical simulations are given to illustrate the effectiveness of our results. Section 5 draws conclusions and discusses further research directions.
The interaction topology of multi-agent systems can be modeled by an undirected graph G = (V, E,
The following notations will be used throughout this paper.
Consider second-order multi-agent systems consisting of N agents and one virtual leader. The dynamics of agents can be described as

The dynamics of the virtual leader can be described as

Denote the sampling period and the k-th event time of agent i by h and 








Since the errors play preliminary roles in an event, we define the state error measurements and tracking error measurements of agent i as


Based on the above definitions, we can further propose the following event condition:






In the following, we will theoretically and numerically show the effectiveness of the protocol (

In this section, we will theoretically show the effectiveness of the protocol (
Referring to the definitions of errors given in Eqs. (
Denoting

Now we provide the main results.

Recalling Lemma 1 and Lemma 2, we have 
Applying the Taylor expansion of
By using Eq. (
Considering Eq. (
From Eq. (

Thus, the function V̇(t) can can be bounded as follows:







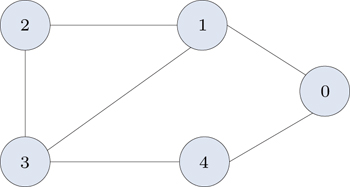
In this section, numerical simulations are presented to demonstrate the effectiveness of the proposed event-based control strategy. Here we consider second-order multi-agent systems with four agents and one virtual leader, whose dynamics are described by Eqs. (
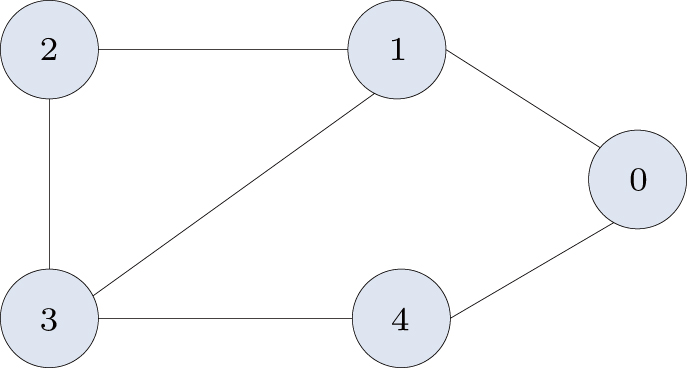 | Fig. 1. Network topology composed of four agents and one virtual leader. |
Without loss of generality, the weights of all the edges are assumed to be 1. Thus, we can obtain 
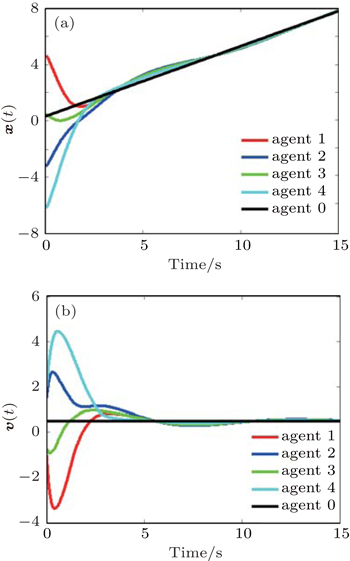
Figure
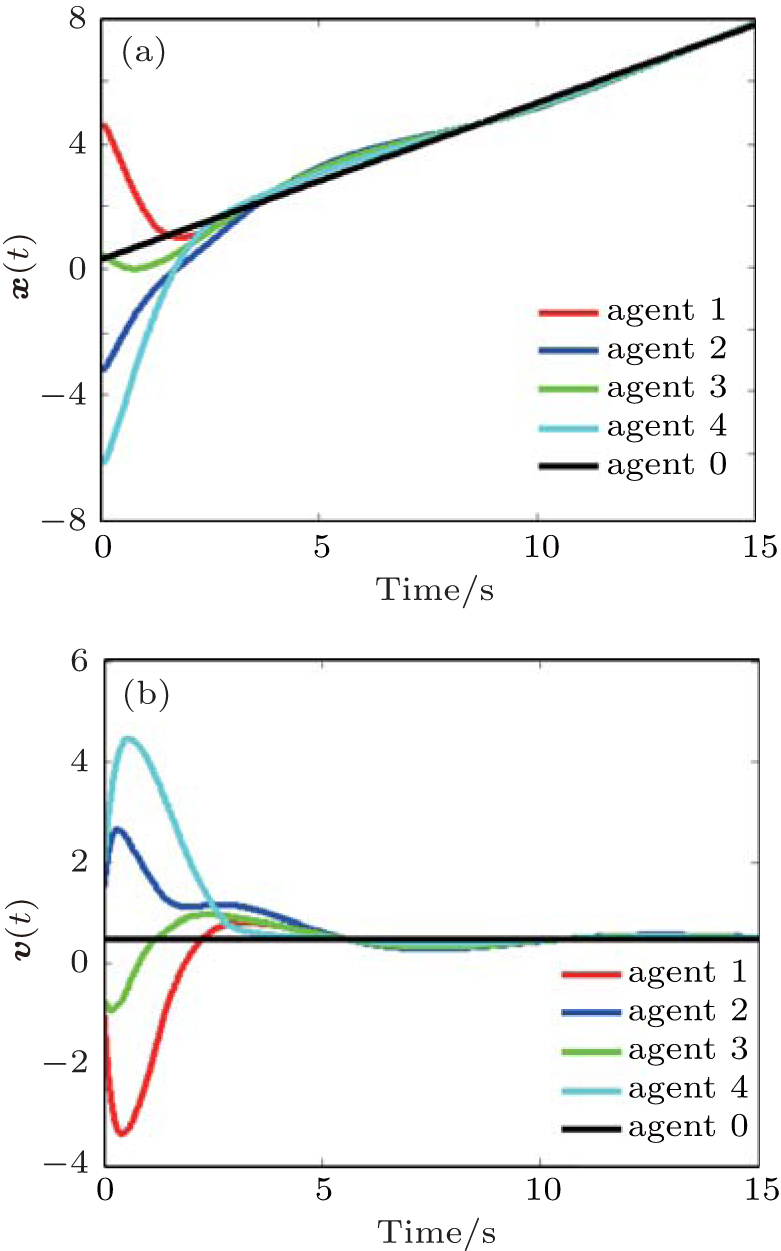 | Fig. 2. The (a) positions and (b) velocities of systems ( |
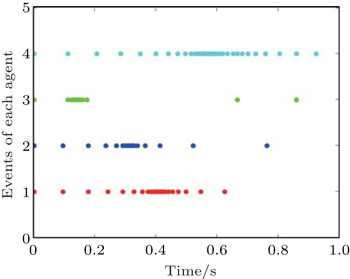
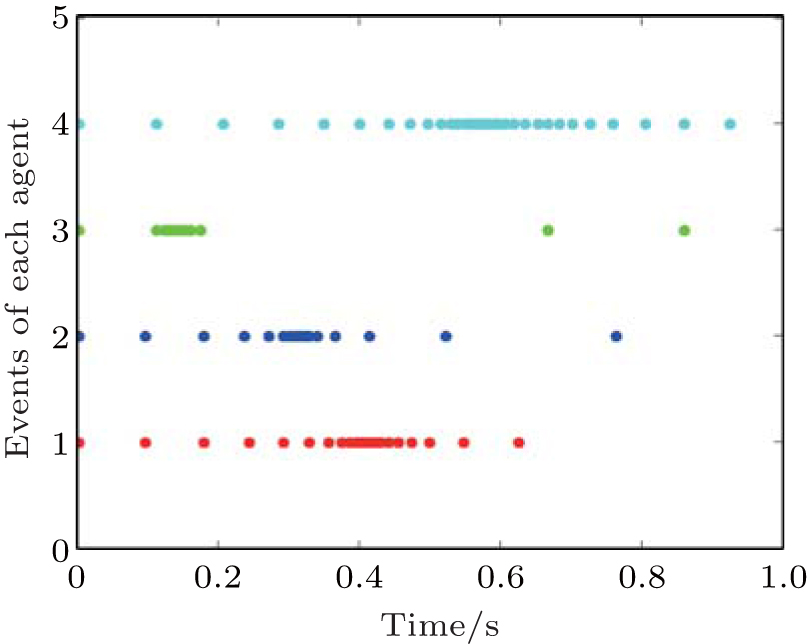 | Fig. 3. Triggered instants of systems ( |
In this paper, we have investigated event-triggered consensus tracking of second-order multi-agent systems. Utilizing the Lyapunov function method, we have obtained sufficient conditions to guarantee second-order multi-agent systems asymptotically achieve consensus tracking. A novel distributed event-triggered strategy has been proposed, in which continuous communication among agents can be avoided and energy consumption can be further reduced. However, it is noted that the sampling of each agent is assumed to be generated at the same moment. Besides, the acceleration of the virtual leader was assumed to be zero and the model considered in this paper does not contain some complicated cases such as measurement noises, switching topology and so on. Therefore, one of the future research directions is devoted to studying the event-triggered consensus tracking of heterogeneous multi-agent systems with asynchronous sampling, measurement noises and switching topology.
| 1 | |
| 2 | |
| 3 | |
| 4 | |
| 5 | |
| 6 | |
| 7 | |
| 8 | |
| 9 | |
| 10 | |
| 11 | |
| 12 | |
| 13 | |
| 14 | |
| 15 | |
| 16 | |
| 17 | |
| 18 | |
| 19 | |
| 20 | |
| 21 | |
| 22 | |
| 23 | |
| 24 | |
| 25 | |
| 26 | |
| 27 | |
| 28 | |
| 29 |