Al-Khateeb H M, Alqadi M K, Alzoubi F Y, Albiss B, Hasan (Qaseer) M K, Ayoub N Y. Levitation and lateral forces between a point magnetic dipole and a superconducting sphere. Chinese Physics B, 2016, 25(5): 058402
Permissions
Levitation and lateral forces between a point magnetic dipole and a superconducting sphere
Al-Khateeb H M1, †, , Alqadi M K1, Alzoubi F Y1, Albiss B1, Hasan (Qaseer) M K1, Ayoub N Y2
Department of Physics, Jordan University of Science and Technology, Irbid, Jordan
School of Basic Sciences and Humanities, German Jordanian University, Amman, Jordan
The dipole–dipole interaction model is employed to investigate the angular dependence of the levitation and lateral forces acting on a small magnet in an anti-symmetric magnet/superconducting sphere system. Breaking the symmetry of the system enables us to study the lateral force which is important in the stability of the magnet above a superconducting sphere in the Meissner state. Under the assumption that the lateral displacement of the magnet is small compared to the physical dimensions of our proposed system, analytical expressions are obtained for the levitation and lateral forces as a function of the geometrical parameters of the superconductor as well as the height, the lateral displacement, and the orientation of the magnetic moment of the magnet. The dependence of the levitation force on the height of the levitating magnet is similar to that in the symmetric magnet/superconducting sphere system within the range of proposed lateral displacements. It is found that the levitation force is linearly dependent on the lateral displacement whereas the lateral force is independent of this displacement. A sinusoidal variation of both forces as a function of the polar and azimuthal angles specifying the orientation of the magnetic moment is observed. The relationship between the stability and the orientation of the magnetic moment is discussed for different orientations.
The phenomenon of a magnet floating above a superconductor has been studied for different geometrical shapes of the magnet as well as the superconducting sample. Different groups of researchers reported their experimental results of the magnetic levitation force,[1–7] while several theoretical models were adopted to explain and support the experimental works.[8–22] Coffey[10] and Yang[11] studied the case of a symmetric magnet/superconducting sphere system when the magnetic moment is oriented perpendicular to the surface of the sphere. Recently, based on the image method, the results of Coffey and Yang were reproduced as well as generalized for arbitrary orientations of the magnetic moment.[12] In this paper, we study the magnetic interaction between a point magnetic dipole of an arbitrary orientation levitated above a superconducting sphere in the Meissner state.
It is well known[10–12] that the force on a small magnet located exactly at the symmetry axis of a superconducting sphere has only one component in the vertical direction (it is called the levitation force). In order to have another component of the force (the lateral force, which is in the horizontal direction), we have to break the symmetry of the system by moving the small magnet laterally from the axis of symmetry (the vertical axis of the sphere as shown in Fig. 1). This component plays a major role in the stability of the magnet–superconducting levitation systems.[11,17,18] In this paper, the parameters upon which the lateral and the levitation components of the force depend are studied and we try to relate these components to the vertical and horizontal stability of the small permanent magnet. We use the dipole–dipole interactions model[8] to investigate the angular dependence of the magnetic interaction energy of the system and the levitation and lateral forces acting on the small magnet levitated above a superconducting sphere in the Meissner state. In our calculations, the small magnet is modeled as a point magnetic dipole, while the superconductor is treated as a continuous array of point dipoles. Integrating the dipole–dipole interactions over the volume of the superconducting sphere enables us to derive the analytical expressions for the magnetic interaction energy in the system. The components of the force that act on the magnet can be calculated easily by taking the gradient of the magnetic interaction energy.
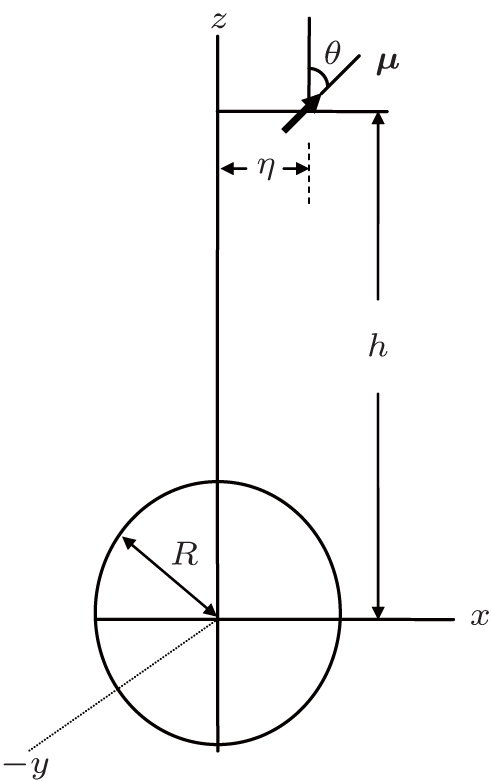
Fig. 1. Schematic diagram of the magnet/superconductor system. The small magnet has a permanent magnetic moment μ at polar angle θ and azimuthal angle ϕ (not shown in the figure). The magnet is placed a distance h vertically above the center of the superconducting sphere of radius R and moved laterally a distance η along the x axis.
2. Dipole–dipole interaction model
Using the dipole–dipole interaction model, we can derive analytical expressions for the levitation and lateral forces acting on the permanent small magnet above a superconducting sphere. Figure 1 shows the magnet/sphere system. The small magnet is considered to be a point dipole of magnetic moment μ, with a polar angle θ and an azimuthal angle ϕ. The magnet is levitated at a height h above a superconducting sphere of radius R, and laterally displaced a small distance η from the vertical axis of the sphere.
The detailed description of this model has been given in the previous publications,[8,9] and in this section, we just give the final result. In the Meissner state, the magnetic induction B is completely expelled from the superconducting sphere. Therefore, the magnetic interaction energy of the magnet/superconductor system can be written as
where dμ is the magnetic moment of each point dipole in the superconductor and H(r) is the external magnetic field produced by the small magnet inside the superconductor at the vector position r. The external magnetic field is given by[23]
The levitation and the lateral forces can be derived from the well-known formula
To simplify our calculations, a few assumptions are taken here. The superconductor is assumed to be in a perfect Meissner state in which the field is totally expelled by the superconductor, however in real superconductors, there is still a weak penetration of the magnetic field.[7] To avoid inconsistency, we work in the low field limit where the Meissner state is a good approximation that leads to accurate results regarding the interaction force.[24] This is made by assuming that the magnet is very small and, hence, the magnetic moment is very weak. Moreover, we ignore the demagnetization effect and focus on the qualitative behavior of the force in the system, because the analytical simulation of the demagnetization effect is complicated, and it will affect the magnitude of the force rather than its behavior.[24,25]
3. Results and discussion
In this section, we calculate the integral in Eq. (1) and evaluate the components of the force in Eq. (3). The magnetic moment μ of the small permanent magnet above the superconductor oriented in space can be decomposed as follows (see Fig. 1):
The superconductor/magnet system has anti-symmetry about the z axis. Therefore, the force on the magnet has two non-vanishing components: an upward force along the z axis, Fz (usually called the levitation force) and a second component in the plane perpendicular to the z axis, Fη (usually called the lateral force). Equations (1) and (3) result in very complicated formulas; to simplify these formulas, we assume that the lateral displacement η (along the x axis) is very small compared to other dimensions of the system. These components depend on the radius of the superconducting sphere R, the orientation of the magnetic moment μ, and the height h of the magnet from the origin. The analytical expressions for the levitation and the lateral forces can be written as
where
It is clear from Eqs. (5) and (6) that the levitation force is linearly proportional to the lateral displacement η while the lateral force is independent of η. The angular dependence of these forces is complicated; therefore, we will study special cases at certain polar or azimuthal angles.
Figure 2 shows the calculated levitation force Fz as a function of h for two different orientations of μ, one along the z axis and the other lying in the xy plane. In both cases, the levitation force does not depend on the lateral distance η, decreases rapidly by increasing the height h of the magnet, and goes to zero within a few millimeters above the sphere. Moreover, the levitation force for μ oriented along the z axis is always greater than that for μ lying in the xy plane.
Fig. 2. The levitation force as a function of the height of the small magnet above the center of the superconducting sphere for two different orientations of the magnetic moment of the magnet: along the z axis and in the xy plane. The following parameters have been used: the magnitude of the magnetic moment μ = 0.2 G·cm3, and R = 0.50 cm.
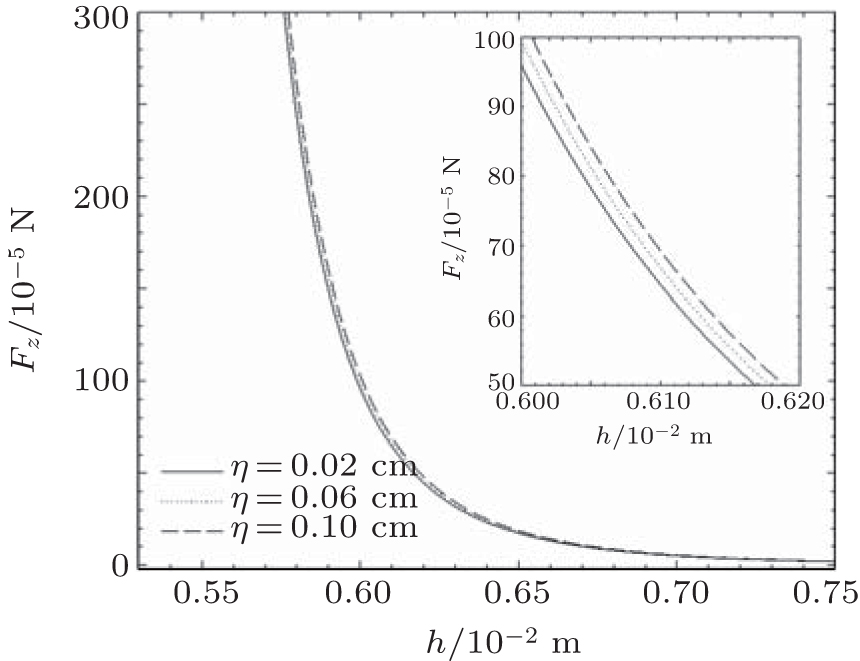
Figure 3 shows the dependence of the levitation force Fz on the height h of the magnet when the magnetic moment is oriented at the polar angle θ = 45° and the azimuthal angle ϕ = 45°, and for three different lateral displacements (η = 0.02 cm, 0.06 cm, 0.10 cm). For all values of η, the levitation force exhibits the same sort of behavior, decreasing very quickly by increasing the height of the magnet. For the same height h, the levitation force Fz increases as η increases.
Fig. 3. The levitation force as a function of the height of the small magnet above the center of the superconducting sphere for three different lateral displacements along the x axis: η = 0.02 cm, 0.06 cm, 0.10 cm. The inset represents expanding the scale of the height in the region between 0.60 cm and 0.62 cm. The following parameters have been used: μ = 0.2 G·cm3, R = 0.50 cm, θ = 45°, and ϕ = 45°.
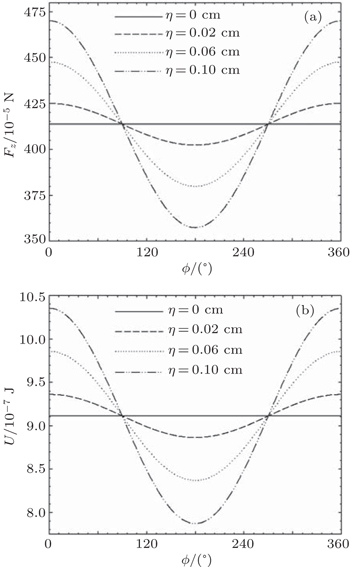
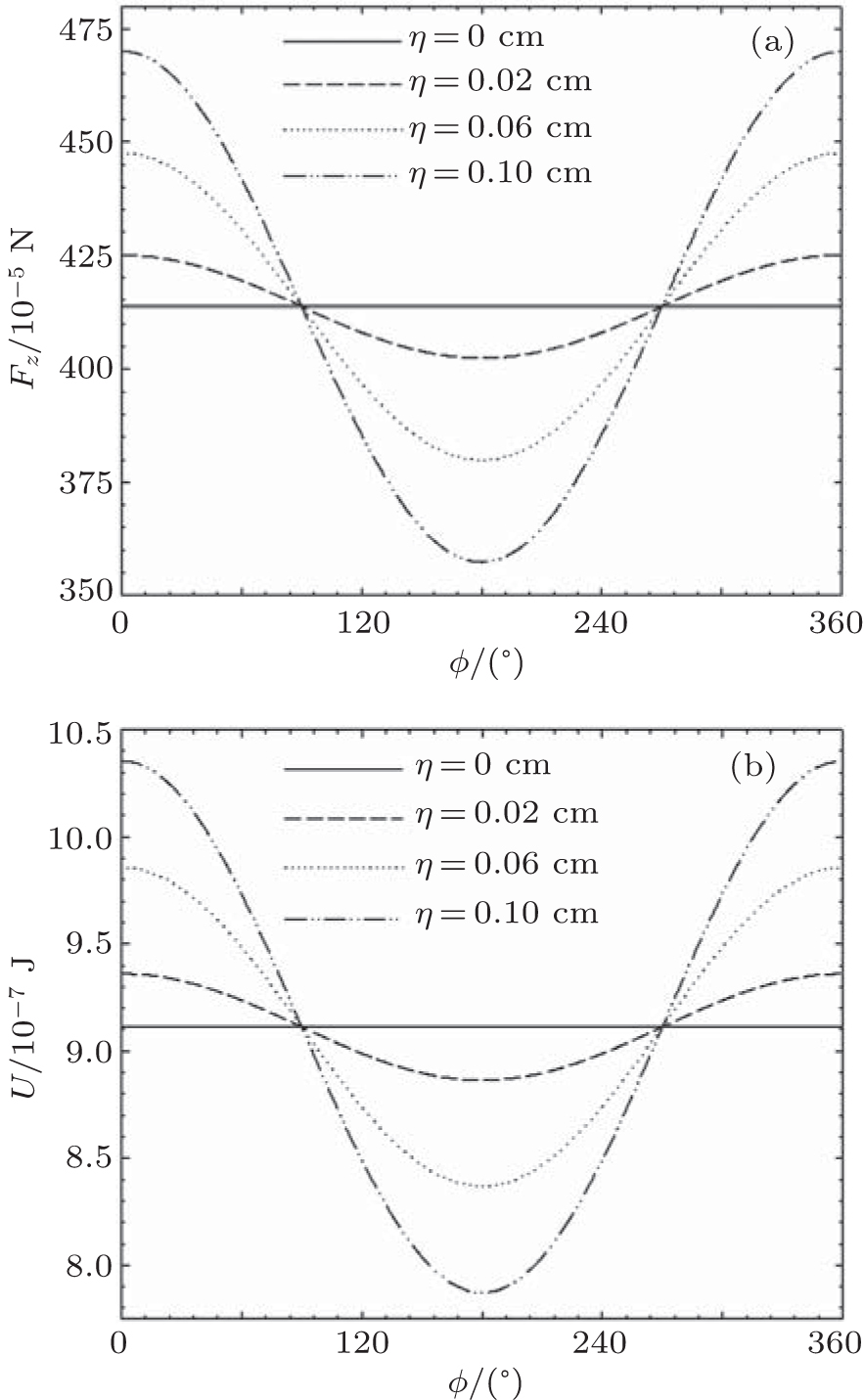
In Fig. 4, we show the levitation force Fz and the magnetic interaction energy U of the system as functions of the azimuthal angle ϕ at the polar angle θ = 45° for different lateral displacements (η = 0.02 cm, 0.06 cm, 0.10 cm). When the lateral displacement is equal to zero (η = 0, the magnet is placed on the symmetric axis of the sphere), the levitation force and the magnetic interaction energy have constant values independent of the azimuthal angle ϕ. For η ≠ 0, the levitation force and the magnetic energy both change sinusoidally with the azimuthal angle ϕ. The interaction energy has the maxima at ϕ = 0° and 360°, which represents the unstable equilibrium for the magnet; on the other hand, the energy has a minimum at ϕ = 180°, which represents a stable equilibrium. If the magnet is at ϕ = 180° and it rotates slightly away from this angle, it will return back to the initial orientation. The amplitude of the oscillation for both the levitation force and the interaction energy increases as the lateral displacement increases. It is important to mention that the levitation force and the magnetic energy have similar curvatures for different polar angles, as shown in this figure.
Fig. 4. (a) The levitation force and (b) the magnetic interaction energy as functions of the azimuthal angle of the magnetic moment of the magnet for different lateral displacements: η = 0.02 cm, 0.06 cm, 0.10 cm. The following parameters have been used: μ = 0.2 G·cm3, R = 0.50 cm, θ = 45°, and h = 0.57 cm.
Figure 5 shows the dependence of the lateral force Fη on the height h of the magnet for θ = 45° and different azimuthal angles ϕ. The figure shows that the lateral force has a negative sign for 0° ≤ ϕ < 90° but a positive sign when 90° < ϕ ≤ 180°. Similarly, the lateral force has opposite signs in the regions of 180° < ϕ ≤ 270° and 270° < ϕ ≤ 360°.
Fig. 5. The lateral force as a function of the height of the small magnet above the center of the superconducting sphere for different azimuthal angles: ϕ = 0°, 60°, 90°, 120°, 180°. The following parameters have been used: μ = 0.2 G·cm3, R = 0.50 cm, and θ = 45°.
In Fig. 6, we plot the variation of the lateral force Fη as a function of the azimuthal angle ϕ for different polar angles (θ = 0°, 30°, 45°). The lateral force is zero when θ = 0°. For θ ≠ 0°, the lateral force varies sinusoidally with the azimuthal angle ϕ. It has a negative value when ϕ is in the regions of 0° ≤ ϕ ≤ 90° and 270° ≤ ϕ ≤ 360° and a positive value when ϕ is in the region of 90° ≤ ϕ ≤ 270°. The lateral force has the minimum at ϕ = 0° and 360°, and it has the maximum at ϕ = 180°. From Fig. 6, we can see that in the interval 0° ≤ θ ≤ 90°, the system has a stable equilibrium at the azimuthal angles ϕ = 0° and 360°, and an unstable equilibrium at ϕ = 180°. The stability of this system depends on angle θ.
Fig. 6. The lateral force as a function of the azimuthal angle of the magnetic moment of the magnet for different polar angles (θ = 0°, 30°, 45°). The following parameters have been used: μ = 0.2 G·cm3, R = 0.50 cm, and h = 0.57 cm.
4. Conclusion
We calculated the levitation and the lateral forces between a small magnet and a superconducting sphere in the Meissner state using the dipole–dipole interaction model for the anti-symmetric superconductor/magnet system. We obtained analytical expressions for both forces as a function of the geometry of the magnet/superconductor system and the orientation of the magnetic moment of the magnet. The results showed that the levitation force does not depend on the lateral displacement when the magnetic moment has a polar angle of 0° or 90° and for any arbitrary azimuthal angle. The levitation force varies sinusoidally with the azimuthal angle and the magnet has a stable equilibrium at the azimuthal angle of 180° and an unstable equilibrium at the angle of 0° or 360°. The lateral force varies solenoidally with the azimuthal angle and the stability depends on the polar angle of the moment.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
 , Alqadi M K1, Alzoubi F Y1, Albiss B1, Hasan (Qaseer) M K1, Ayoub N Y2]
, Alqadi M K1, Alzoubi F Y1, Albiss B1, Hasan (Qaseer) M K1, Ayoub N Y2]