
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Complex dynamics of an archetypal self-excited SD oscillator driven by moving belt friction
[Li Zhi-Xin 1 , Cao Qing-Jie 1, †,  , Alain Léger 2 ]
, Alain Léger 2 ]
, Alain Léger 2 ]
|
|


† Corresponding author. E-mail:
Project supported by the National Natural Science Foundation of China (Grant Nos. 11372082 and 11572096) and the National Basic Research Program of China (Grant No. 2015CB057405).
We propose an archetypal self-excited system driven by moving belt friction, which is constructed with the smooth and discontinuous (SD) oscillator proposed by the Cao et al. and the classical moving belt. The moving belt friction is modeled as the Coulomb friction to formulate the mathematical model of the proposed self-excited SD oscillator. The equilibrium states of the unperturbed system are obtained to show the complex equilibrium bifurcations. Phase portraits are depicted to present the hyperbolic structure transition, the multiple stick regions, and the friction-induced asymmetry phenomena. The numerical simulations are carried out to demonstrate the friction-induced vibration of multiple stick-slip phenomena and the stick-slip chaos in the perturbed self-excited system. The results presented here provide an opportunity for us to get insight into the mechanism of the complex friction-induced nonlinear dynamics in mechanical engineering and geography.
Much attention has been paid to the self-excited vibration induced by friction in practical mechanical engineering systems, i.e., brake, [ 1 – 3 ] chattering machine tools, [ 4 , 5 ] drill string, [ 6 , 7 ] and others. Most of the investigations in the literature are based on the conventional mass-on-moving-belt models to describe the friction-induced vibration in engineering systems. The majority of the works have been focused on the model which is characterized by a linear oscillator vibrating on the moving belt to derive the complex dynamics induced by friction, such as periodic motion, [ 8 , 9 ] chaotic behavior, [ 10 ] stick-slip vibration, [ 11 , 12 ] and Hopf-bifurcations. [ 13 ] However, even nonlinear friction dynamics has been of interest by introducing a cubic term into the harmonic oscillator on the moving belt in recent years, [ 14 – 16 ] few nonlinear phenomena induced by friction are explored in comparison with the conventional friction-induced periodic solution, chaos, and stick-slip vibrations. In fact, there are many nonlinear friction systems characterized by geometric nonlinearities of elastic large deformation or large displacement in mechanical engineering, for example, the geometric nonlinear vibration induced by friction between the brake disc and pad in a brake system, [ 17 – 19 ] the moving tectonic plates in an earthquake fault moving across each other, [ 20 , 21 ] and the ice stream and moving subglacial bed of Whillans Ice Stream (WIS) capable of stick-slip motion. [ 22 ]
At present, the research on the geometric nonlinear friction dynamics is very insufficient, and very few studies concerning the coupling from a theoretical point of view in the case of nonlinear friction and geometric nonlinearity exist. Therefore, it is necessary to construct a nonlinear friction system with geometric nonlinearity for getting insight into the mechanism of the complex friction-induced nonlinear dynamics in mechanical engineering and geography.
The motivation of this paper is to propose a novel friction system with geometric nonlinearity for truly revealing the dynamical characteristics of the geometric nonlinear friction systems in engineering and geography based on the well-known geometrical model [ 23 ] of SD oscillator proposed by Cao et al. [ 24 – 26 ] together with the classical moving belt, which is called the self-excited SD oscillator. Another motivation is to demonstrate multiple stick regions and the asymmetry induced by belt friction for this self-excited system. Furthermore, the complex dynamic behaviors of the perturbed self-excited SD oscillator are illustrated numerically to present the friction-induced vibration of multiple stick-slip phenomena and coexisting attractors. Through these investigations of self-excited SD oscillator, we gain a deeper understanding of geometric nonlinear friction dynamics in mechanical engineering and geography.
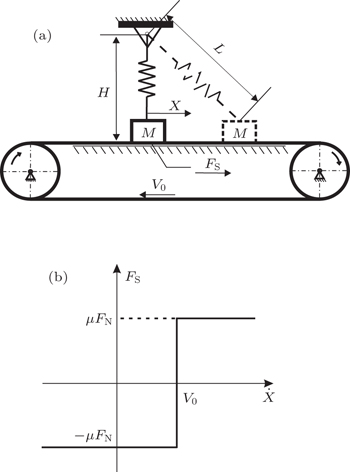
The system analyzed in this paper is composed of a block of mass M , supported by a moving belt and connected to a fixed support by an inclined linear spring of stiffness coefficient K , which is capable of resisting both tension and compression, as shown in Fig.
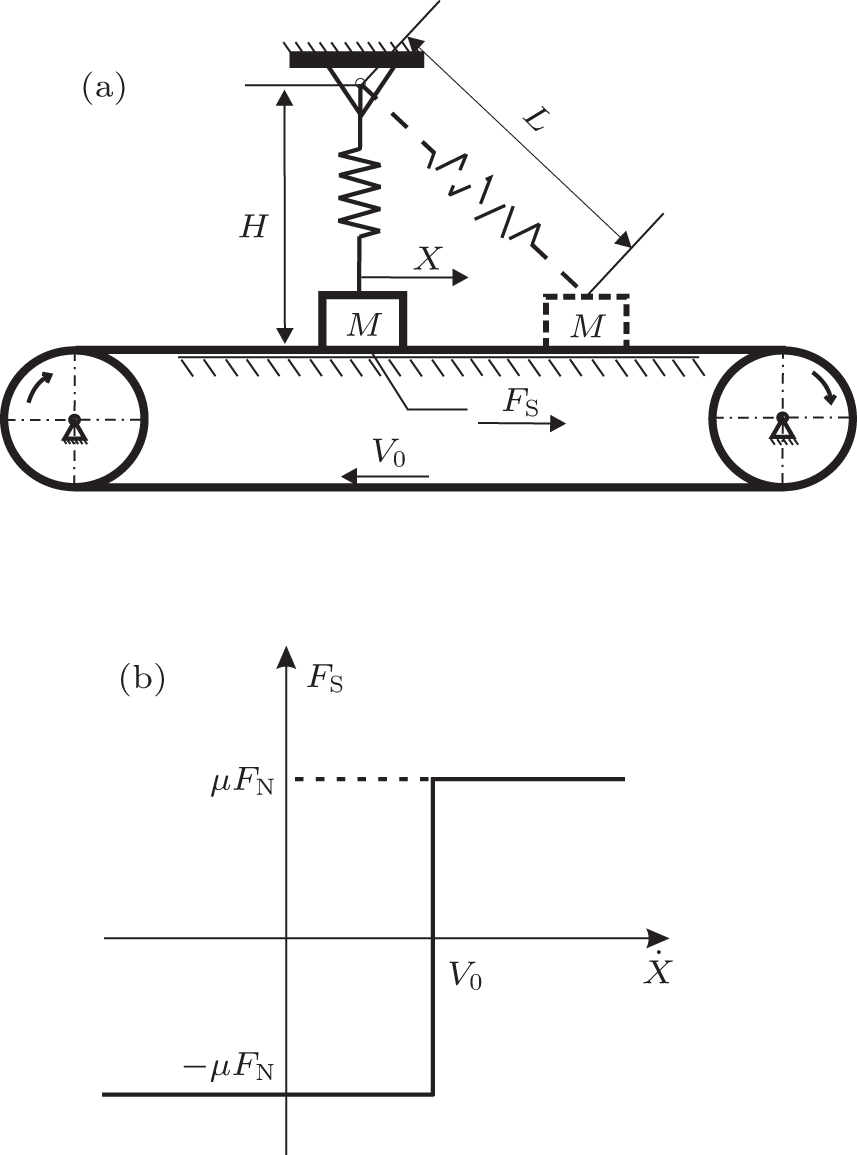 | Fig. 1. (a) The dynamical model in the form of a self-excited oscillator, where a mass linked by an elastic spring vibrates on the moving belt. (b) Coulomb friction law. |
The equation of motion for this mass–spring on the moving belt is given by





If system (


The motion of the mass can be characterized into two qualitatively different modes, the slip and stick modes. During the slip mode, the mass and the belt have different velocities ( ẋ ≠ v 0 ), equation (

During the stick mode, the mass rests on the belt ( ẋ = v 0 ), no acceleration exists in this case and equation (

Equation (

It is worth noting that although the spring itself is linear, this system is strongly nonlinear, having an irrational restoring force [ 28 ] 

In the following analysis, we will analyze the equation of motion for the self-excited SD oscillator directly to reflect the natural characters of the system. Furthermore, the friction-induced vibration of multiple stick-slip phenomena and the stick-slip chaos of the perturbed self-excited system will be revealed from the viewpoint of nonlinear dynamics.
In this section, we discuss the complex phase portraits by investigating the equilibrium and the bifurcation of this system. Let ẋ = y , equation (




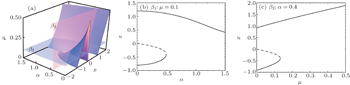
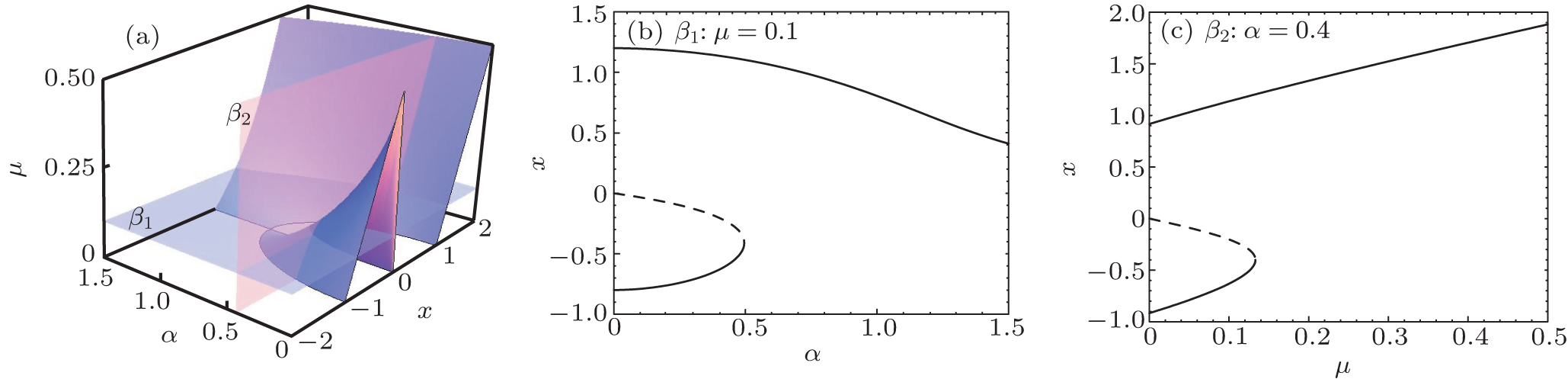 | Fig. 2. Equilibrium surface in ( x , α , μ ) space and sections β 1 and β 2 (the solid and dashed curves represent the stable and unstable branches, respectively). (a) Equilibrium surface. Panels (b) and (c) show center-saddle bifurcation in x – α plane (section β 1 ) for μ = 0.1 and in x – μ plane (section β 2 ) for α = 0.4, respectively. |
For a better overview, the variation of one parameter while the other one is kept constant is shown in two section planes: β 1 shows the variation of α for a constant μ [Fig.
The transition sets 





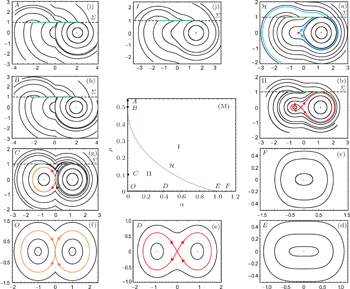
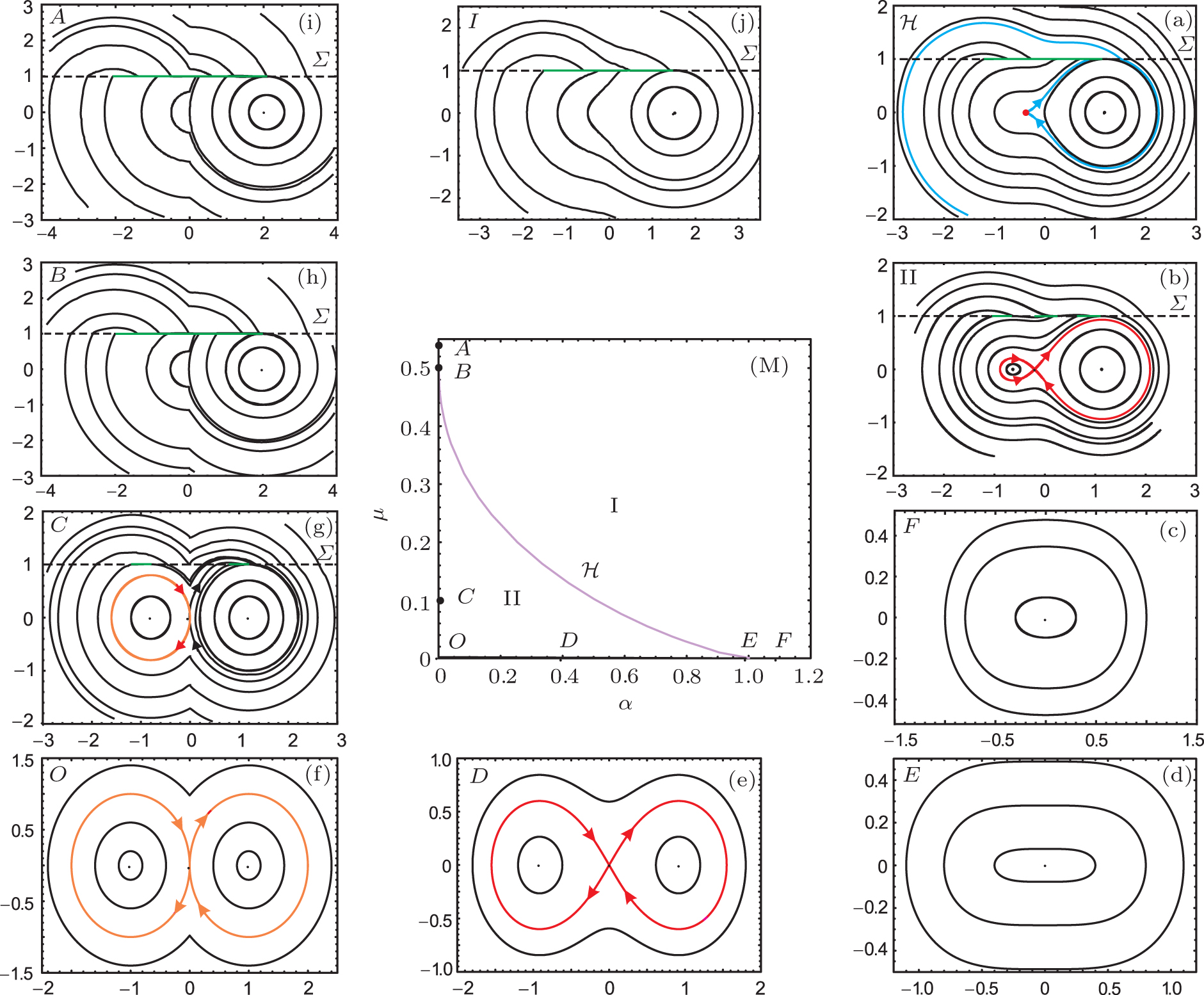 | Fig. 3. (M) Bifurcation diagram and the corresponding phase portraits of different symbols. The  |
All the corresponding phase portraits of system (
Hence, the difference between the SD oscillator and the self-excited SD oscillator can be seen from Fig.
An overview of the dynamical and bifurcation behavior of the self-excited SD oscillator with simultaneous viscous damping and external harmonic excitation will be given in this section. Numerical simulations are carried out to further investigate the belt friction-induced nonlinear dynamics and to explore the multiple stick-slip patterns of the perturbed self-excited system.
In this subsection, the dynamic behavior of the self-excited SD oscillator with a linear damping is investigated. For the case of c ≠ 0 and f = 0, system (

The equilibria of this damped self-excited system are the same as those of system (
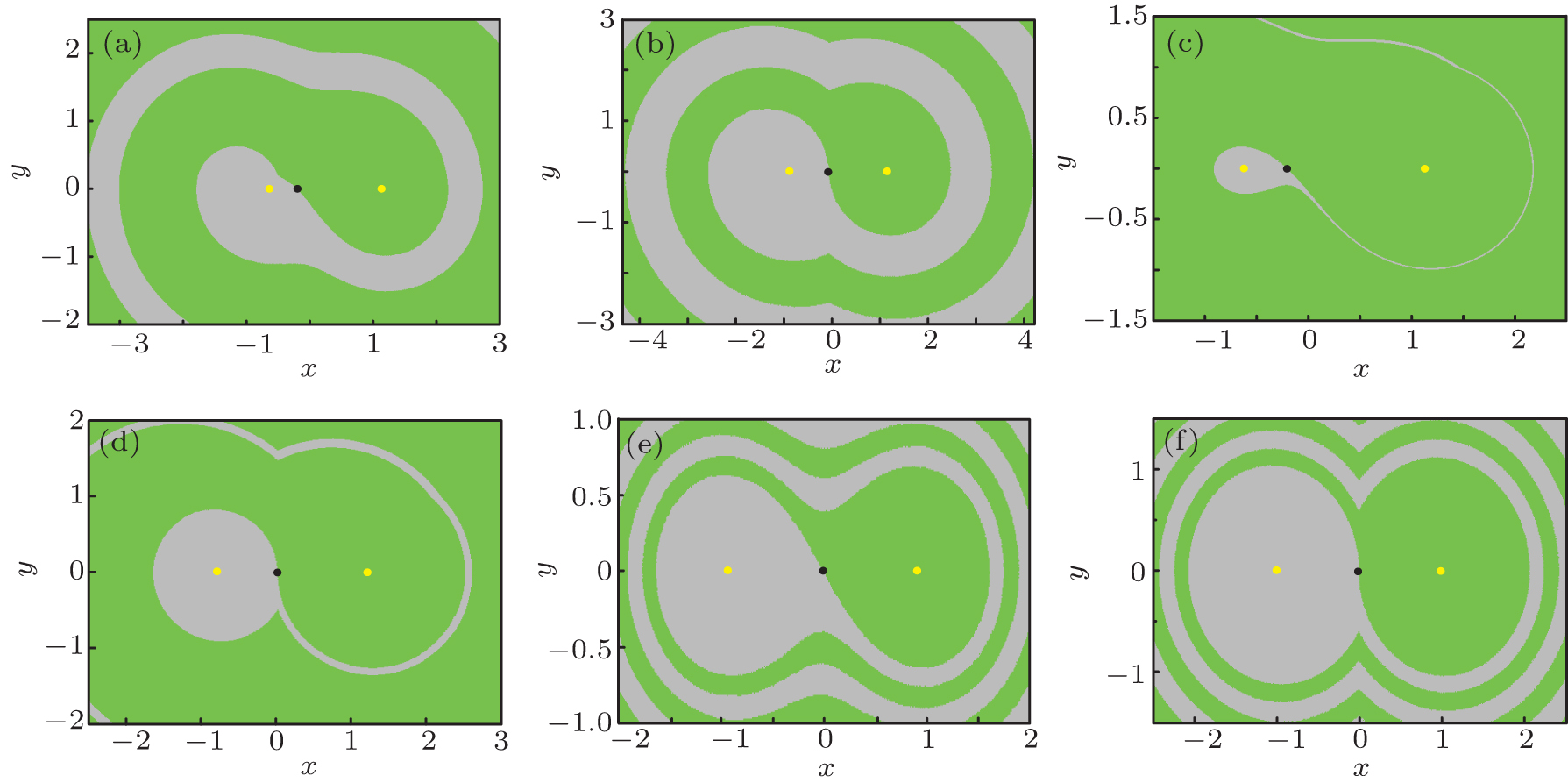 | Fig. 4. Basin analysis of system ( |
In this subsection, we investigate the dynamic behavior of system (
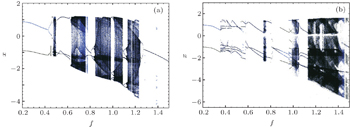
The bifurcation diagrams for the displacement x versus the harmonic excitation force f have been constructed as f increases from 0.2 to 1.5 for two different initial conditions ( x 0 , y 0 ) = (1,0) (blue) and ( x 0 , y 0 ) = (−1,0) (black), as shown in Fig.
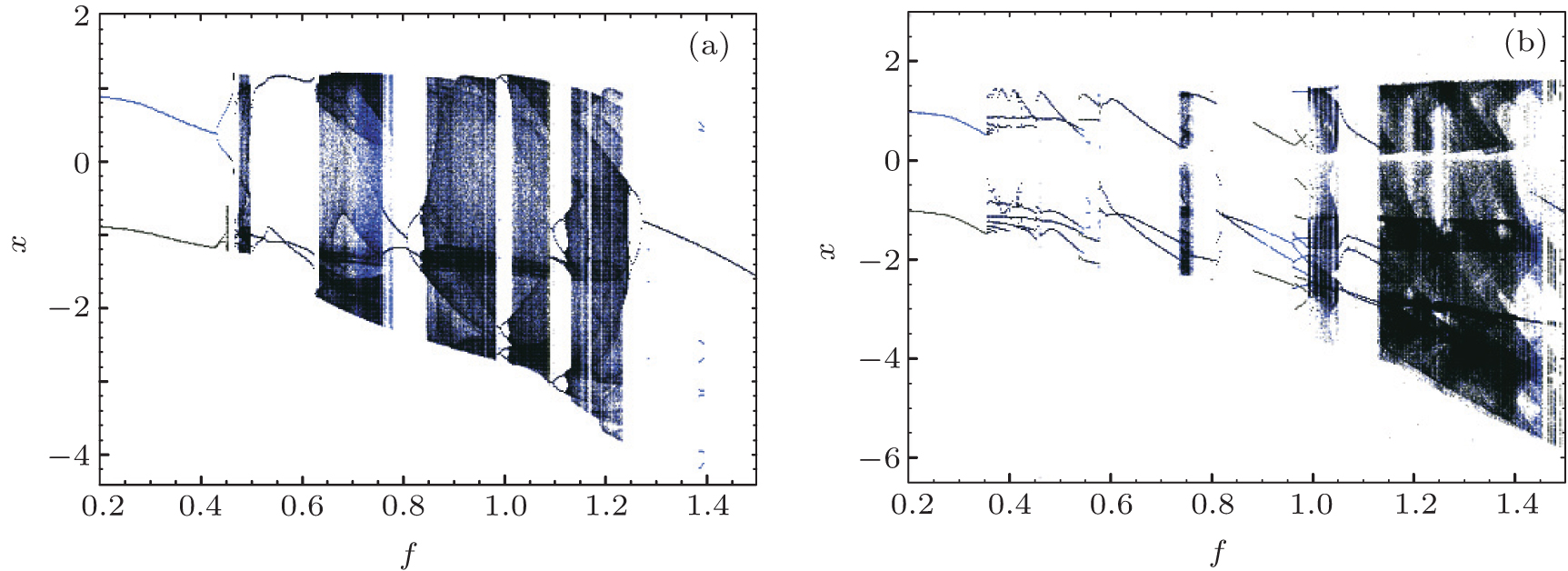 | Fig. 5. Bifurcation diagrams of two coexisting attractors (blue and black) for displacement x versus f , where v 0 = 0.2; (a) α = 0.4, and (b) α = 0. |
In all of the following phase portraits, the cusps correspond to a sign change of the relative velocity, and the short horizontal parts (marked with green lines) in the phase portraits correspond to sticking during the motion.
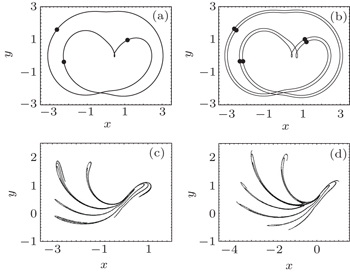
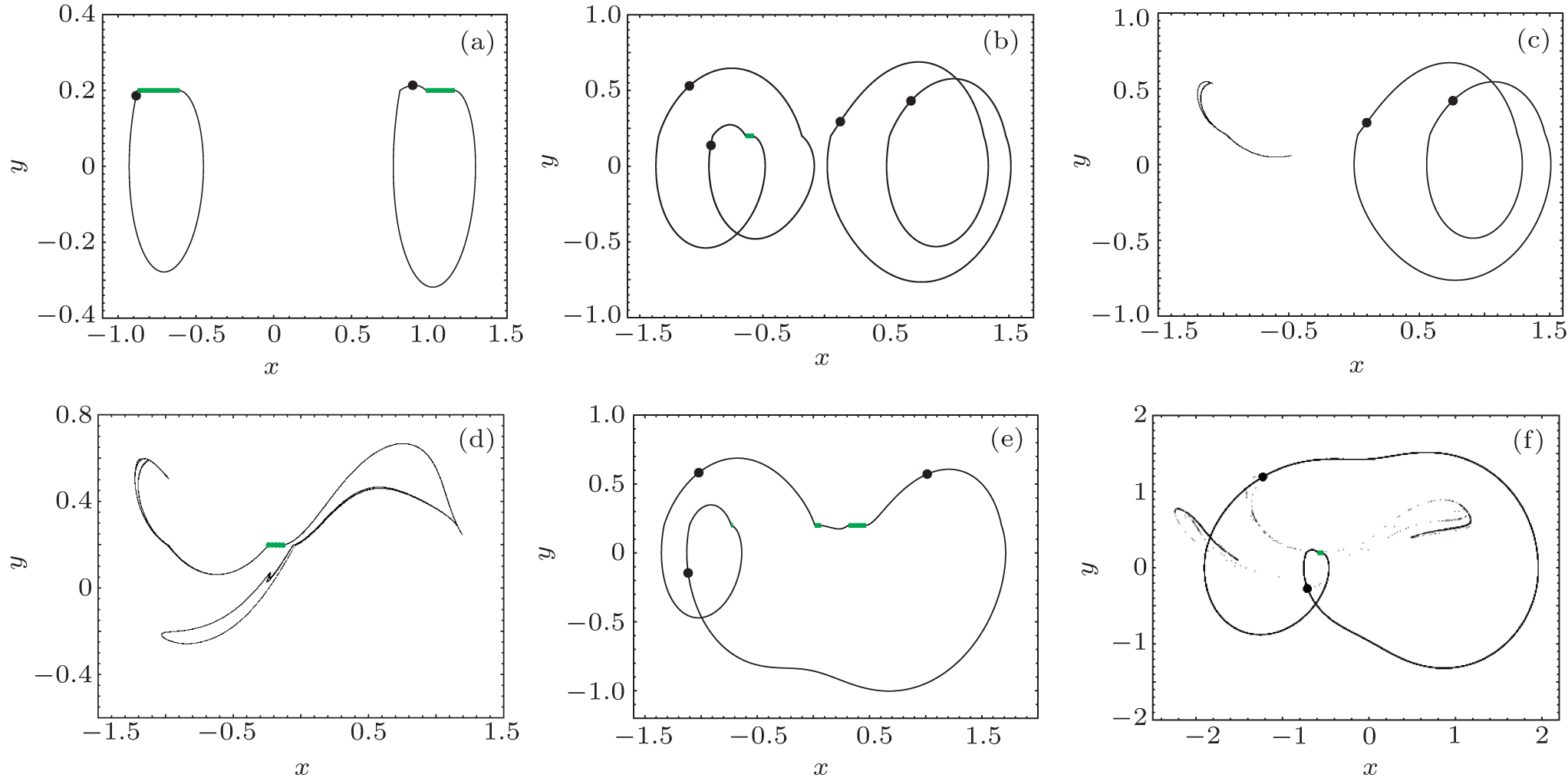 | Fig. 6. Periodic motions and chaotic attractors of system ( |
With the increase of excitation amplitude f , a coexisting pair of asymmetric period doubling can be observed in Fig.
Similarly, as f further increases, the process of a period-3 doubling leading to chaos can be observed from Fig.
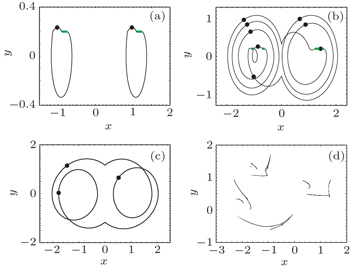
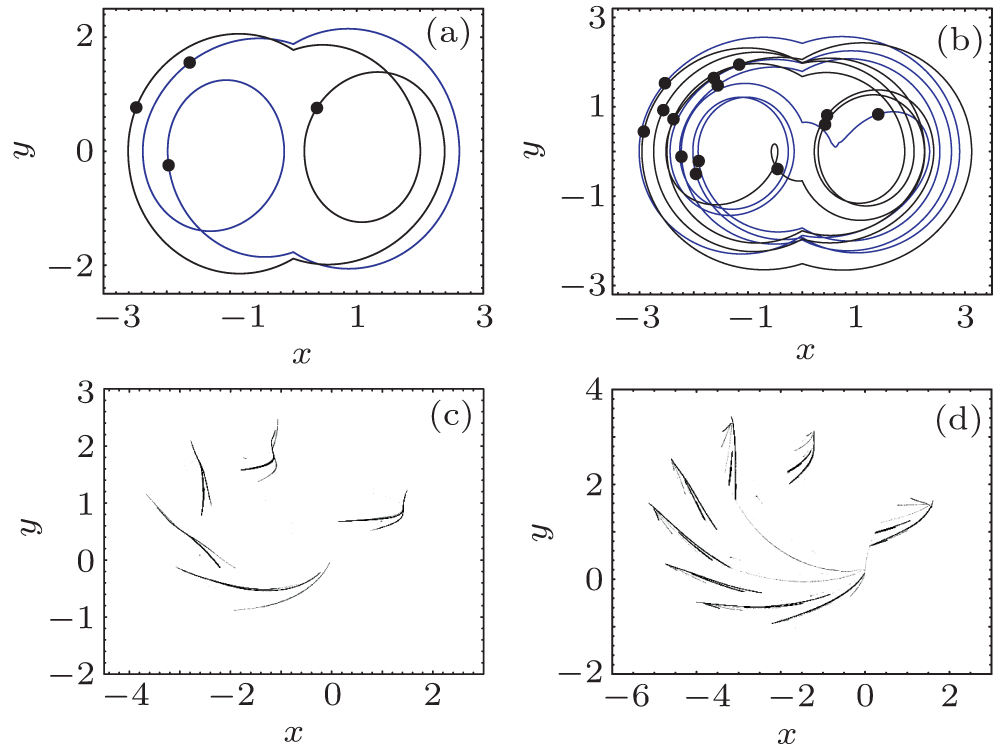
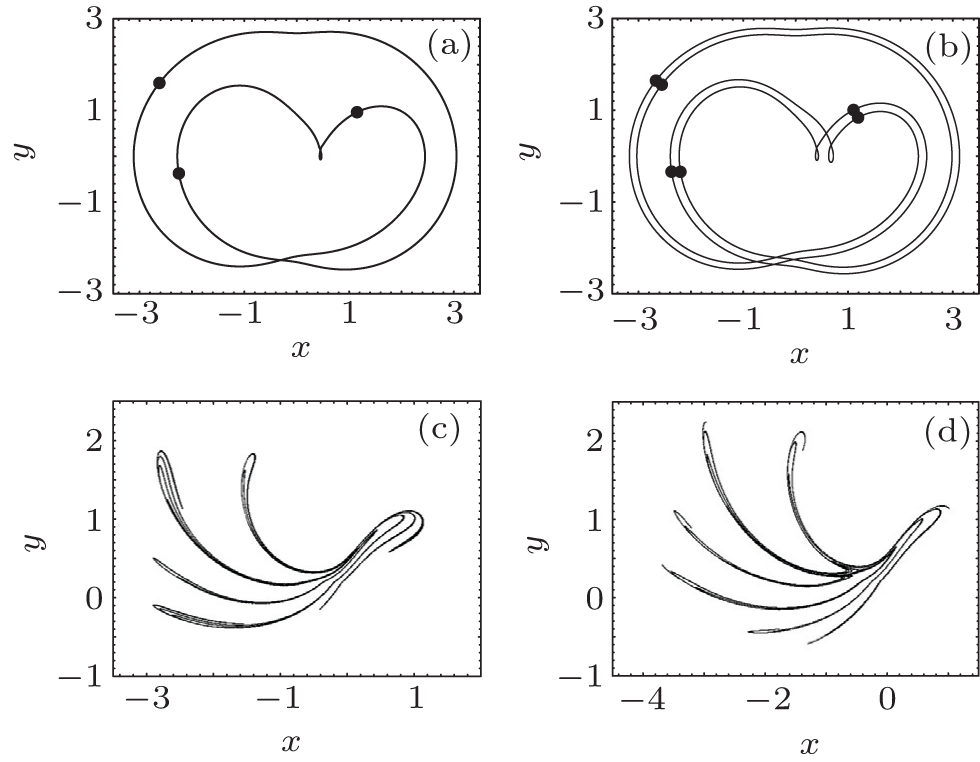 | Fig. 7. Period-3 doubling and chaotic attractors for α = 0.4. (a) Period-3 solution for f = 0.9868. (b) Period-6 solution for f = 1. (c) and (d) Chaotic attractors for f = 1.07 and f = 1.2 with the largest Lyapunov exponents 0.0805 and 0.0781, respectively. |
It is most interesting that the stick-slip period-3 motion depicted in Fig.
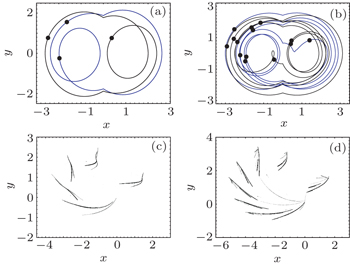
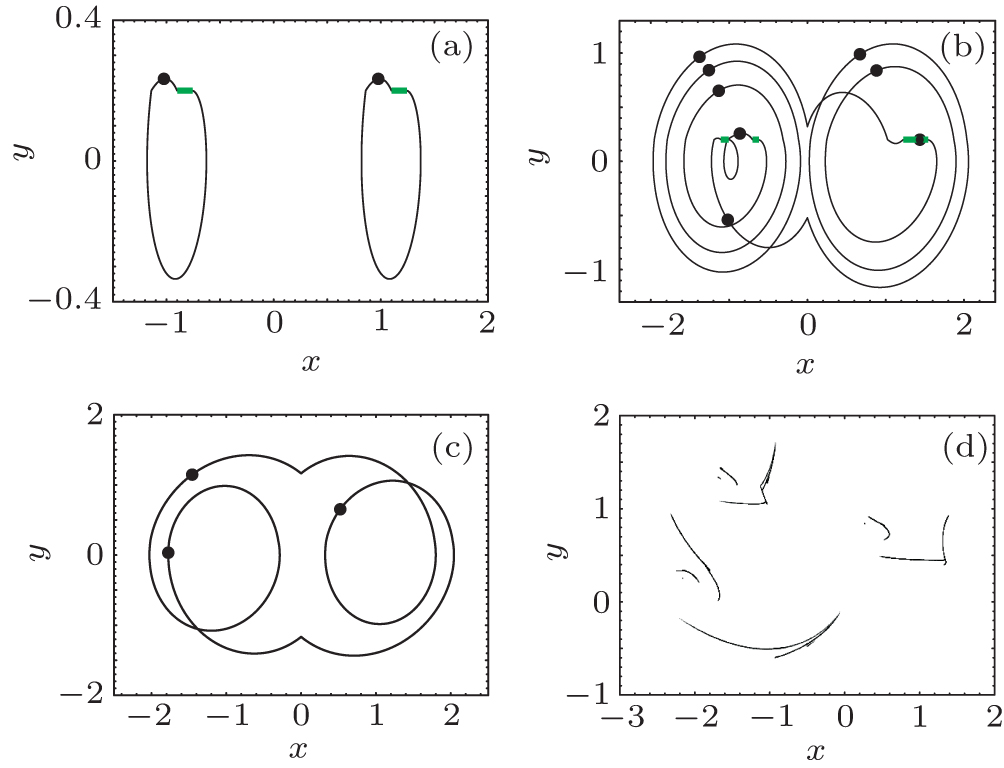 | Fig. 8. Periodic motions and chaotic attractor of system ( |
With the increase of f , the coexisting period-2 solutions without sticking shown in Fig.
 | Fig. 9. Coexistence of periodic motions and chaotic attractors of system ( |
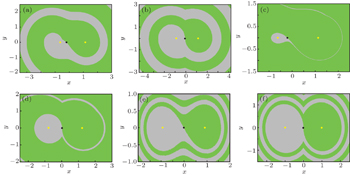
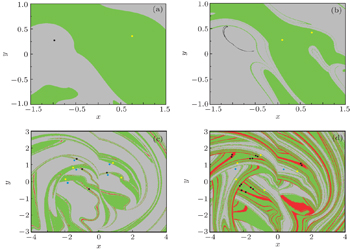
Basin analysis is carried out for investigating the complex coexistence of multiple attractors in system (
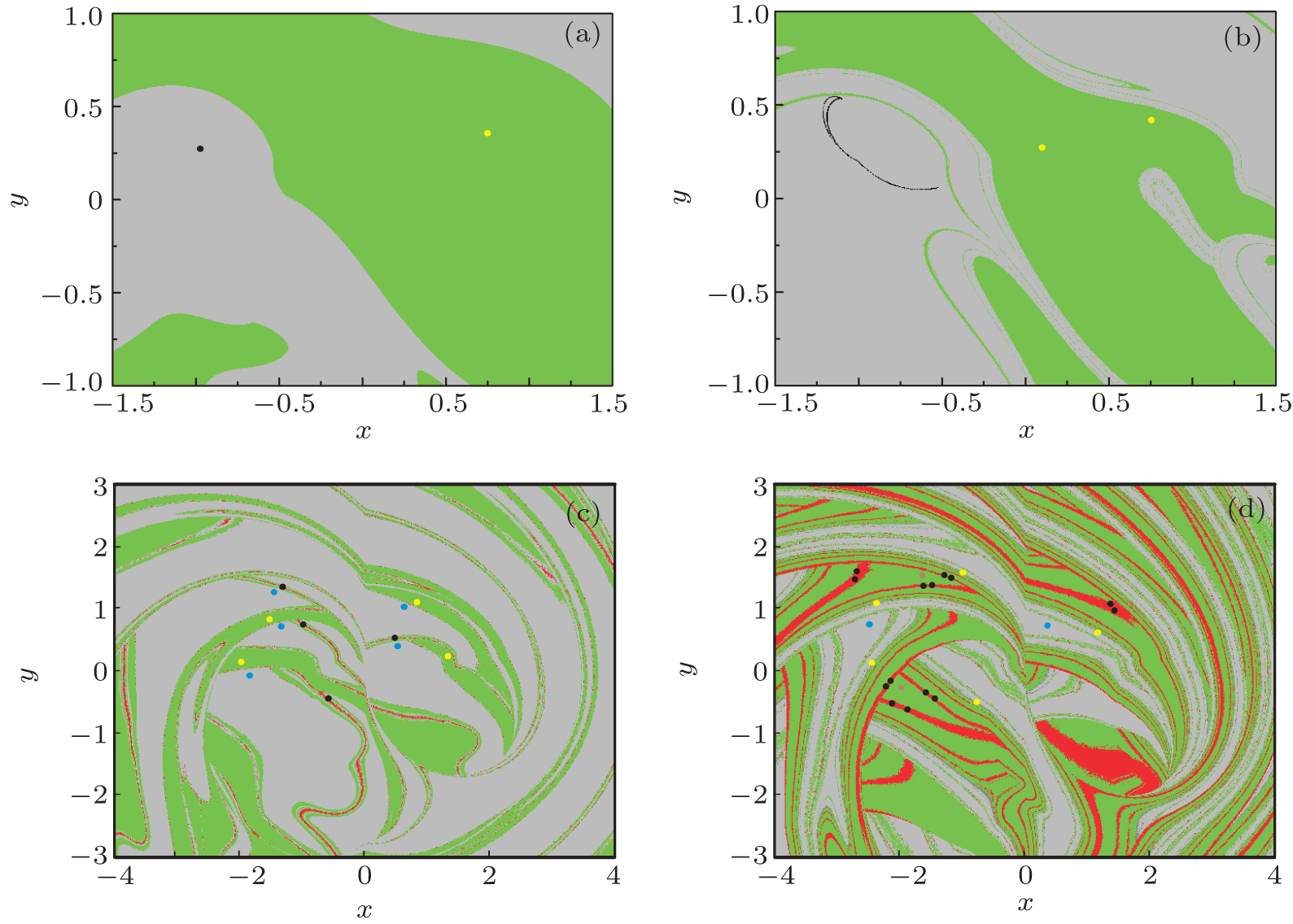 | Fig. 10. Basins of attraction and their corresponding coexisting attractors using Poincaré sections for c = 0.048, g 1 = 2, μ = 0.1, v 0 = 0.2, and ω = 1.08. (a) Coexisting period-1 solutions (black and yellow) for α = 0.4 and f = 0.3. (b) Coexistence of a period-2 solution (yellow) and a chaotic attractor (black) for α = 0.4 and f = 0.4528 with the largest Lyapunov exponent 0.0482. (c) Coexistence of a pair of period-4 solutions (black and yellow) and a period-5 solution (blue) for α = 0 and f = 0.54. (d) Coexistence of a pair of period-2 solutions (brown and blue), a period-5 solution (yellow), and a period-14 solution (black) for α = 0 and f = 0.95. |
System (
The largest Lyapunov exponents for all the chaotic attractors presented in this non-smooth system have been obtained by employing the chaos synchronization method, [ 34 ] as shown in the captions of the figures.
In this paper, we have proposed a novel self-excited SD oscillator driven by moving belt friction. The mathematical model of the belt-driven system has been investigated, where the friction characteristic is modeled as the Coulomb friction. The equilibrium states and bifurcation structures have been investigated. The self-excited system is characterized by the existence of multiple stick regions in the phase portraits which exhibit the hyperbolic structure transition and friction-induced asymmetry phenomena. Under perturbation, the system exhibits complex coexistence of periodic attractors and also the periodic solution with a chaotic attractor, which presents the friction-induced vibration of multiple stick-slip phenomena and the stick-slip chaos in the self-excited system in the presence of viscous damping and an external harmonic force.
The presented oscillator is being actively studied by the authors in two main directions. Firstly, the peculiar properties of multiple stick regions, the hyperbolic structure transition, and the friction-induced asymmetry of this oscillator are being analyzed to better understand the belt friction-induced nonlinear dynamics. The second pursued direction is to focus on the experimental research to measure the related friction characteristic for this belt-driven oscillator. We are currently working in these directions.
| 1 | |
| 2 | |
| 3 | |
| 4 | |
| 5 | |
| 6 | |
| 7 | |
| 8 | |
| 9 | |
| 10 | |
| 11 | |
| 12 | |
| 13 | |
| 14 | |
| 15 | |
| 16 | |
| 17 | |
| 18 | |
| 19 | |
| 20 | |
| 21 | |
| 22 | |
| 23 | |
| 24 | |
| 25 | |
| 26 | |
| 27 | |
| 28 | |
| 29 | |
| 30 | |
| 31 | |
| 32 | |
| 33 | |
| 34 |