{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Function projective synchronization between two different complex networks with correlated random disturbances*
[Jin Yun-Guoa)†  , Zhong Shou-Ming
, Zhong Shou-Minga), b)‡ , An Nac) ]
, Zhong Shou-Ming, An Na|
|


†Corresponding author. E-mail: yunguoj@163.com
‡Corresponding author. E-mail: zhongsm@uestc.edu.cn
*Project supported by the National Natural Science Foundation of China (Grant No. 61273015).
Although function projective synchronization in complex dynamical networks has been extensively studied in the literature, few papers deal with the problem between two different complex networks with correlated random disturbances. In this paper, we present some novel techniques to analyze the problem of synchronization. A probability approach is introduced to obtain an almost sure synchronization criterion. We also present some efficient approaches to analyze the problem of exponential synchronization. For the problem of synchronization in some complex networks, our approaches not only can replace the LaSalle-type theorem but also allow improvements of existing results in the literature. Finally, some numerical examples are provided to demonstrate the effectiveness of the proposed approaches.
Many large-scale physical systems usually consist of large number of interacting individuals, which can be modeled by dynamical networks. Many real networks can be described by complex networks, which are shown to widely exist in various fields of the real world, such as the Internet, World Wide Web, biological networks, electric power grids, and so on. Synchronization processes are ubiquitous in our lives and there are many kinds of synchronizations, such as synchronous communication, signal synchronization, database synchronization, and so on. Not only can network synchronization explain many natural phenomena but also it has many potential applications, such as secure communication, synchronous information exchange over the internet, and the synchronous transfer of digital signals in communication networks. There are many kinds of synchronization, such as generalized synchronization, phase synchronization, partial synchronization, cluster synchronization, and so on.[1– 28]
Function projection synchronization means that the driver and response systems could be synchronized up to a scaling function.[1– 5] Du et al.[1] investigated the problem of function projective synchronization for general complex dynamical networks with time delay. Dai et al.[2] focused on the adaptive generalized function matrix projective lag synchronization for uncertain complex dynamical network with unknown parameters and different dimensions of network nodes. Inner synchronization is concerned with the synchronization among the nodes within a network. Outer synchronization between two or more complex networks[2, 4– 12] is one which means the corresponding nodes of coupled networks could achieve synchronization regardless of synchronizing the inner networks. Li et al.[4] investigated a new generalized projective synchronization phenomenon in a system of two coupled complex networks with different sizes via linear feedback control and the adaptive control method. Using stability analysis, they obtained some of the criteria of the generalized projective synchronization of the two coupled networks. Chen et al.[6] presented a new general network model for two complex networks with time-varying delay coupling. Then they investigated its synchronization phenomena. The two complex networks of the model differ in dynamic nodes, the number of nodes and the coupling connections.
In the real world, dynamical networks are often subject to environmental disturbances; especially, the signal transfer within dynamical networks is always affected by the stochastic perturbations. Lu et al.[29] firstly formulated a switched stochastic dynamical network model. To reflect more realistic dynamic behaviors, many researchers have recently investigated the synchronization problem of complex networks with stochastic effects. Yang et al.[21] studied the globally exponential synchronization of delayed complex dynamical networks with impulsive and stochastic perturbations.
In particular, Wang et al.[8] regarded the outer synchronization between two delay-coupled complex dynamical networks with nonidentical topological structures and a noise perturbation. They assumed that the stochastic effects were driven by a Brownian motion. Such an assumption is a good first step.
Furthermore, Mao[30] established a LaSalle-type asymptotic convergence theorem for the solutions of stochastic differential delay equations. For some complex networks with time day and stochastic effects, the LaSalle-type theorem is a useful tool to obtain some synchronization conditions, but it seems that it is not flexible enough to apply in the problem of synchronization in complex networks with stochastic effects. For example, using the LaSalle-type theorem, some authors[8, 10, 17] dealt with the problem of synchronization rather than exponential synchronization in complex dynamical networks with stochastic effects.
Motivated by the above discussion, we will study the function projective synchronization problem between two different complex networks with correlated random disturbances. We assume that the stochastic effects are driven by two Brownian motions. The correlation coefficient for stochastic effects between two complex dynamical networks is general, which can lead to fruitful results. We present a probability approach to analyze function projective synchronization between the two complex networks. We also present some efficient approaches to analyze the problem of exponential synchronization. Using the property of the Martingale and Gronwally inequality, we obtain some conditions to guarantee that the drive network and response network can realize mean square function projective synchronization. Under a particular assumption, the drive network and response network can almost surely realize exponential synchronization. For the problem of synchronization in some complex networks, not only can our approaches replace the LaSalle-type theorem but also allow improvements of existing results in the literature.
The organization of the remaining part is arranged as follows. In Section 2, two complex networks with stochastic effects are introduced, and some preliminaries are given. In Section 3, the function projective synchronization problem between two different complex networks with stochastic effects, is discussed. In Section 4, numerical examples are provided to demonstrate the effectiveness of the proposed approach. Finally, this paper ends with a conclusion in Section 5.
Consider a general complex dynamical network consisting of N identical linearly coupled nodes. Each node is an n-dimensional dynamical subsystem, whose state equation is described by

where xi(t) = (xi1(t), xi2(t), … , xin(t))T ∈ Rn denotes the state vector. f : Rn → Rn is a continuously differentiable vector function determining the dynamics behavior of the nodes, and satisfies the global Lipschitz condition with Lipschitz constant L > 0, i.e.,

for any y1(t), y2(t) ∈ Rn, where ║ · ║ is Euclidean norm. p(τ 1) : [0, h] → ℝ + is integrable function with

Inner-coupling matrix Г ∈ Rn × n is a positive diagonal matrix. Wi(t), i = 1, 2, is a Brownian motion defined on the probability space

We take the network given by Eq. (1) as the driving network, and the response network with an adaptive control scheme is given by
where yi, ϕ i, σ 2, and g have the same meanings as those in Eq. (1). D = (di j)N× N is the coupling configuration matrix. ρ is the correlation coefficient for stochastic effects in the driving network and respond network. ui is the controller for node i to be designed according to the specific network structures C and D. We define the error term

where α (t) is a continuously differentiable function.
Assumption 1 There exists a constant M1 satisfying


where i = 1, 2, … , N.
Assumption 2ρ = 1, σ 2 (t, yi (t) = β yi (t), σ 1(t, xi(t)) = β xi(t), i = 1, 2, … , N, where β is a constant.
Definition 1 The driving network and the response network are said to achieve function projective synchronization in mean square, if there exists a continuously differentiable scaling function α (t) such that

In particular, it is said to achieve mean square exponential synchronization, if there exist η > 0, M > 0 such that,

Lemma 1[31] For any vectors x, y ∈ Rn, and positive-definite matrix Q ∈ Rn× n, the following matrix inequality holds: 2xTy ≤ xTQx + yTQ− 1y.
Lemma 2[32] (Gronwally’ inequality) Let T > 0 and u(· ) be a Borel measurable bounded non-negative function on [0, T]. If

for some constants c, v, then

In this section, using a probability approach, we shall obtain an almost sure synchronization criterion. By the property of the Martingale and Gronwally inequality, we will show that the driving network and the response network can realize mean square exponential synchronization under Assumption 1. Furthermore, we also present a comparison approach to analyze exponential synchronization under Assumption 2.
Theorem 1 Assume that the following adaptive control scheme is satisfied
where ki is any positive constant for i = 1, 2 … , N. If Assumption 1 holds, then driving network (1) and the response network (3) can realize almost sure synchronization.
Proof By inequality (4), we have that the differentiation of ei(t) is

Substituting Eqs. (1)– (3) into Eq. (6), we have
Substituting Eq. (5) into Eq. (7), we get
where i = 1, 2, … , N. Construct a Lyapunov function as
where q* is a positive value to be determined. The differentiation of V(t) along the state trajectories (8) is

where
By Lemma 1, we have
where 
Then, by Lemma 1, we have
By expression (9)– (11) and the assumption that 
where q0 is a positive constant. Therefore,
Integrating x on both sides of inequality (12) from 0 to t, we have
Let

By Eq. (14) and the fact that ρ is correlation coefficient for the two Brownian motions W1(t) and W2(t), we have that

It is well known that if the random variables Y1, Y2, … , Ym are independent and Yj has the normal distribution with mean μ j and variance 


where Xi(0, 1) has the standard normal distribution. Note that
By Assumption 1, we have that, ∀ ε > 0, there exists t1 > 0 such that

holds almost everywhere. According to expressions (13)– (18), we can obtain
for t > t1. By inequality (19), we have

In fact, if equation (20) does not hold, then by inequality (19), we have

which is a paradox. Equation (20) leads directly to

Therefore, the driving network and the response network can realize almost sure function projective synchronization under Assumption 1.
Remark 1 Under Assumption 1, driving network (1) and the response network (3) can also realize mean-square exponential synchronization. Note that


i = 1, 2, … , N, is a 

Using Lemma 2 and the fact that 

By inequality (21), we have

Therefore, the driving network and the response network can realize mean-square exponential synchronization.
Remark 2 We would like to present a comparison approach to analyze function projective synchronization between the two dynamical networks under Assumption 2. In the case, the driving network (1) and the response network (3) can realize almost sure exponential synchronization. Consider the following stochastic comparison equation
where ci(t), i = 1, 2, … , N, is an n-dimensional vector function. By Assumption 2, inequality (13), Eq. (22), and the fact that 


Let 

Note that

Put Eqs. (24) and (25) together, we have

From inequalities (23) and (26), we see that if Assumption 2 holds, then the driving network and the response network can realize almost sure function projective exponential synchronization.
Remark 3 For the proof of Theorem 1, to the best of our knowledge, we are the first to introduce such a probability approach for dealing with the problem of synchronization in complex dynamical networks. For the problem of synchronization in some complex networks, not only can our approaches replace the LaSalle-type theorem but also allow improvements of existing results in the literature. In some papers (see, e.g., Refs. [8], [10], and [17]), the authors only present some synchronization rather than exponential synchronization criteria. In particualr, the study also presents an equivalent way of regarding Itô ’ s integral. The techniques presented by us may hopefully shed some light on the theoretical analysis of synchronization in a variety of complex dynamical networks with stochastic effects.
In this section, we present several numerical examples to show the effectiveness of the theoretical results. The Lorenz system is represented by

which has a chaotic attractor when a = 10, b = 8/3, c = 28. Lorenz equations may describe such different systems as laster devices, disk dynamos, and several problems related to convection. The Chen system has wide application potential in secure communications, and it has a more complication topological structure. The Chen system can be described as

which has a chaotic attractor when a = 35, b = 3, c = 28. We consider the following driving network and response network:

where
We assume that p(τ ) ≡ 1/h. The controller ui(t) can be designed by Theorem 1 as follows:
where i = 1, 2, 3. The two coupling matrices are

We take qi(0) = 1, ki = 0.1, i = 1, 2, 3, α (t) = 1 + sint, τ 2(t) = 1/(1 + et), h = 0.8, ω 1 = ω 2 = 0.5. The inner coupling matrix is given by Г = diag{1, 1, 1}.
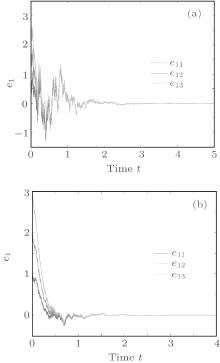
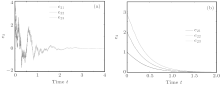
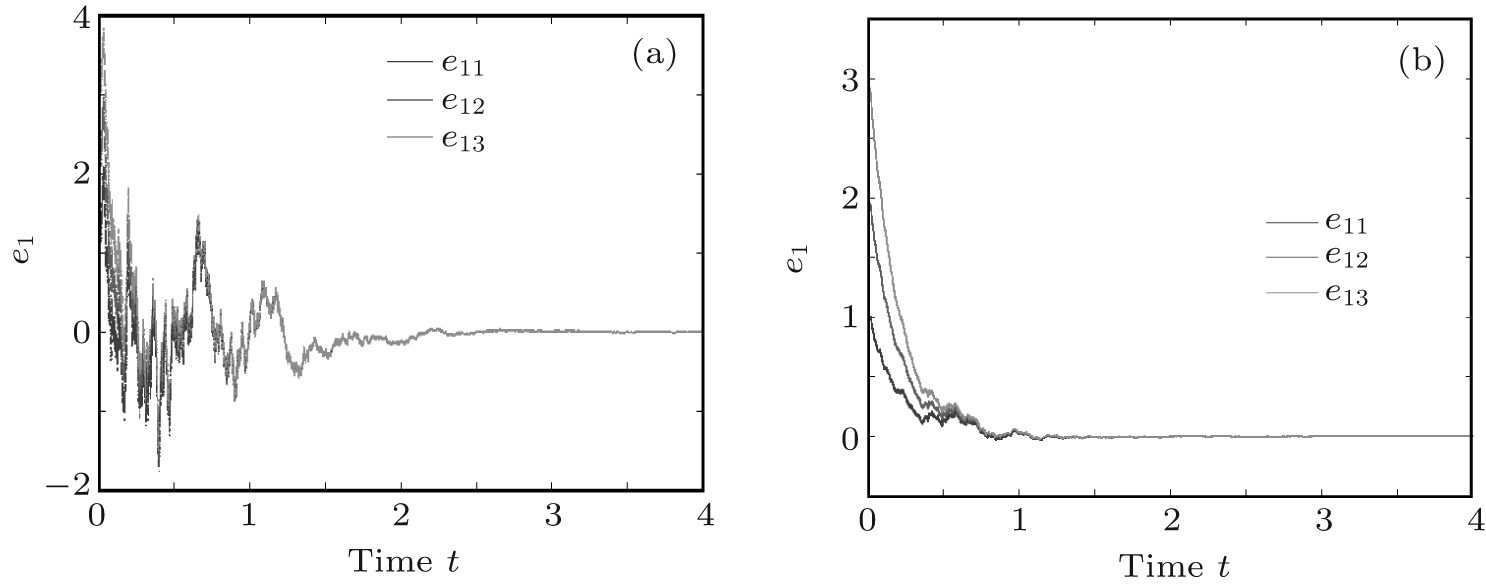
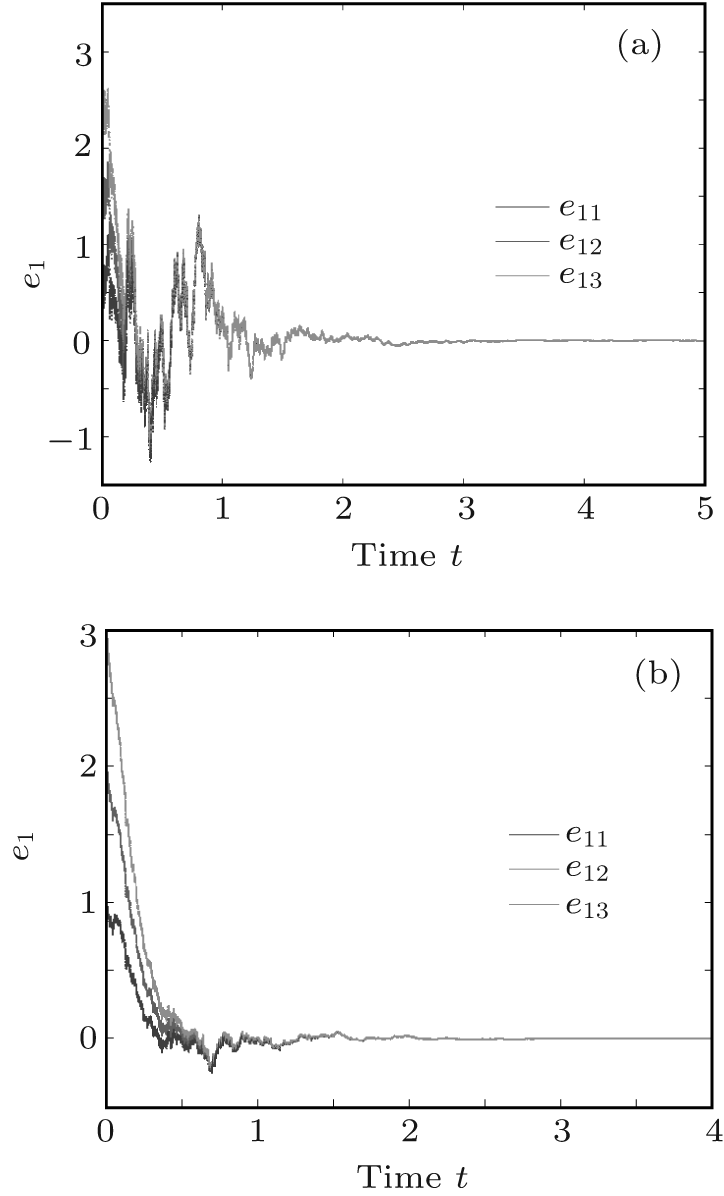 | Fig. 1. The trajectories of the synchronization error e1 under two different correlation coefficients. In panel (a), ρ = 0; in panel (b), ρ = 1. |
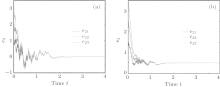
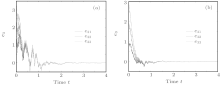
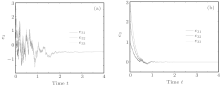
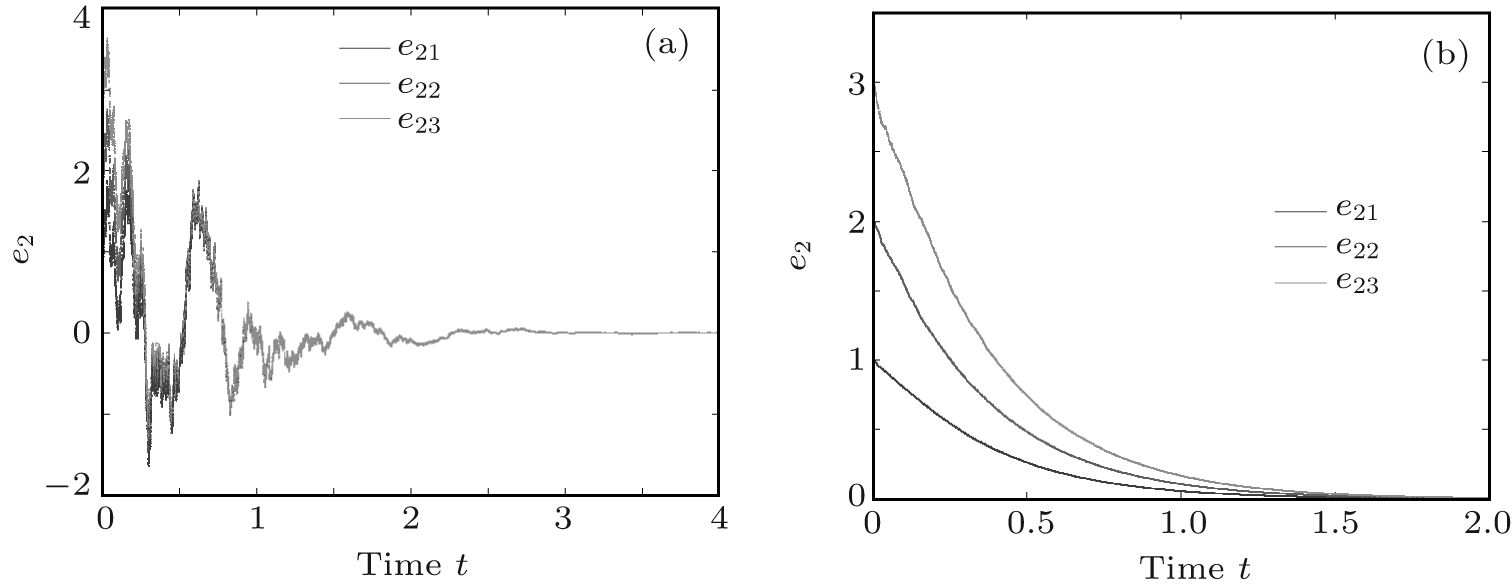
Figures 1– 3 show the trajectories of the synchronization errors ei, i = 1, 2, 3, under two different correlation coefficients. In Figs. 1– 3, we assume that
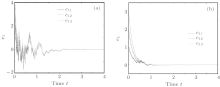
From the diagrams, we see that the correlation coefficient significantly affects the convergence to synchronization. Figures 4– 6 show the trajectories of the synchronization errors ei, i = 1, 2, 3, under two different volatility processes. In Figs. 4– 6, we assume that ρ = 1. From the diagrams, we see that the volatility process significantly affects the convergence to synchronization.
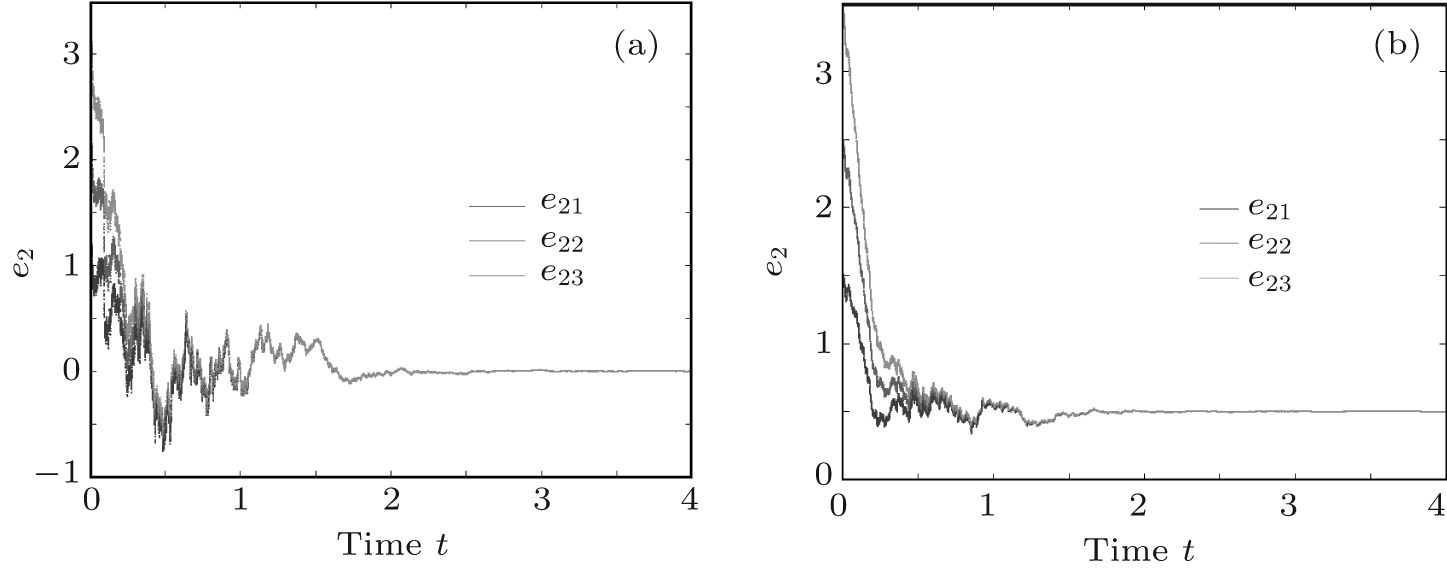 | Fig. 2. The trajectories of the synchronization error e2 under two different correlation coefficients. In panel (a), ρ = 0; in panel (b), ρ = 1. |
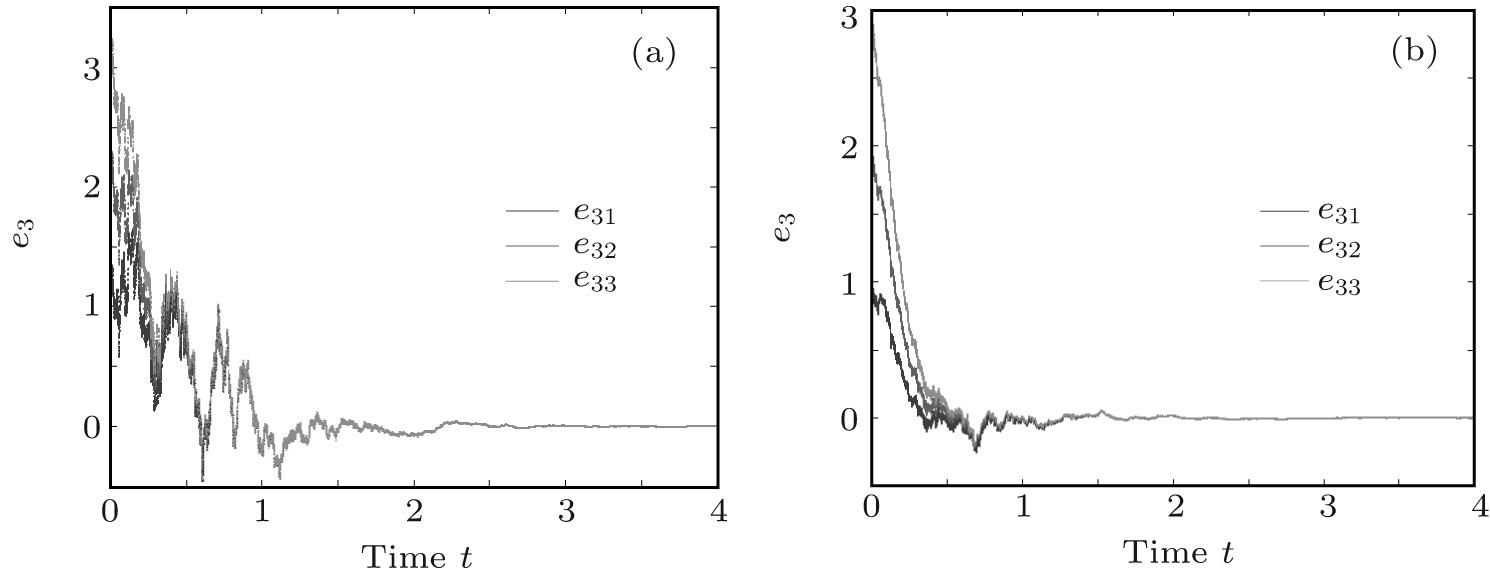 | Fig. 3. The trajectories of the synchronization error e3 under two different correlation coefficients. In panel (a), ρ = 0; in panel (b), ρ = 1. |
 | Fig. 4. The trajectories of the synchronization error e1 under two different volatility processes. In panel (a), σ 2(t, yi(t)) = 8yi(t), σ 1(t, xi(t)) = 8xi(t); in panel (b), σ 2(t, yi(t)) = yi(t), σ 1(t, xi(t)) = xi(t), i = 1, 2, 3. |
 | Fig. 5. The trajectories of the synchronization error e2 under two different volatility processes. In panel (a), σ 2(t, yi(t)) = 8yi(t), σ 1(t, xi(t)) = 8xi(t); in panel (b), σ 2(t, yi(t)) = yi(t), σ 1(t, xi(t)) = xi(t), i = 1, 2, 3. |
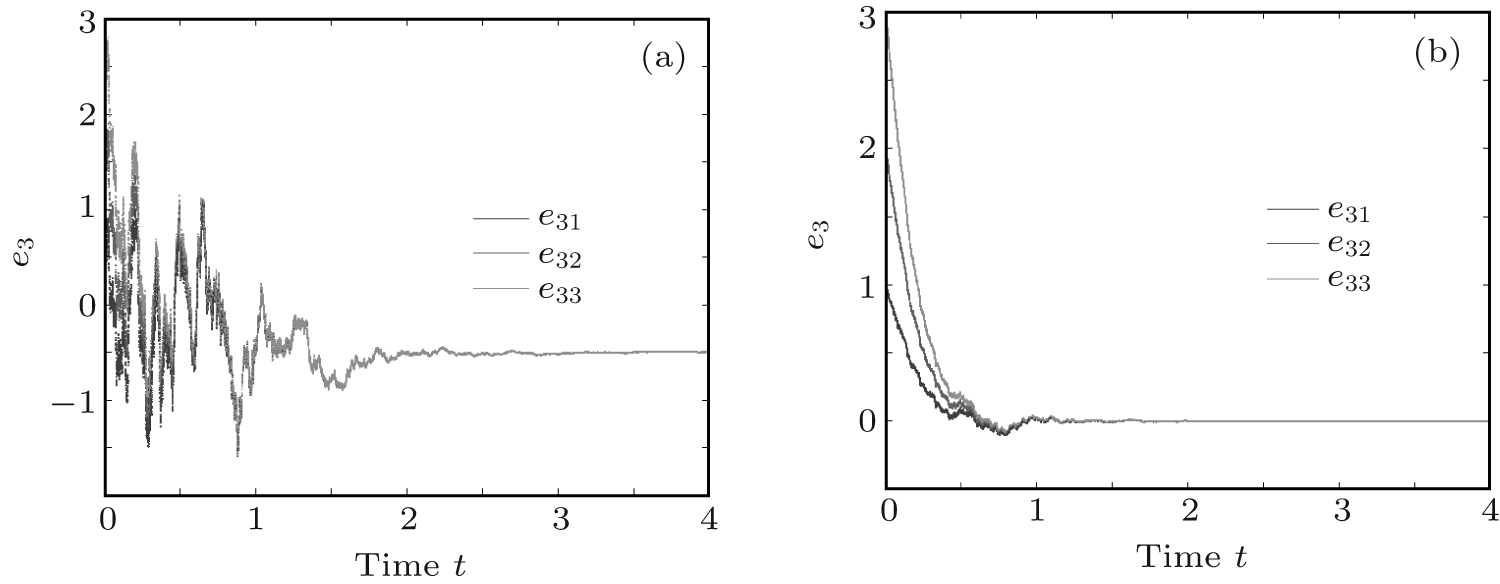 | Fig. 6. The trajectories of the synchronization error e3 under two different volatility processes. In panel (a), σ 2(t, yi(t)) = 8yi(t), σ 1(t, xi(t)) = 8xi(t); in panel (b), σ 2(t, yi(t)) = yi(t), σ 1(t, xi(t)) = xi(t), i = 1, 2, 3. |
In this paper, the function projective synchronization problem for two complex networks with correlated stochastic effects has been investigated. By a probability approach, we obtain some conditions to guarantee that the driving network and the response network can be almost surely synchronized. Furthermore, using some efficient techniques, we also obtain some conditions to guarantee that the driving network and the response network can realize exponential synchronization. Finally, some numerical examples are provided to demonstrate the effectiveness of the proposed approaches. The effects of stochastic disturbances are illustrated through numerical experiments. Through numerical experiments and simulations, we demonstrated that stochastic disturbances significantly affect the convergence to synchronization.
| 1 |
|
| 2 |
|
| 3 |
|
| 4 |
|
| 5 |
|
| 6 |
|
| 7 |
|
| 8 |
|
| 9 |
|
| 10 |
|
| 11 |
|
| 12 |
|
| 13 |
|
| 14 |
|
| 15 |
|
| 16 |
|
| 17 |
|
| 18 |
|
| 19 |
|
| 20 |
|
| 21 |
|
| 22 |
|
| 23 |
|
| 24 |
|
| 25 |
|
| 26 |
|
| 27 |
|
| 28 |
|
| 29 |
|
| 30 |
|
| 31 |
|
| 32 |
|