Robust output feedback cruise control for high-speed train movement with uncertain parameters
Robust output feedback cruise control for high-speed train movement with uncertain parameters |
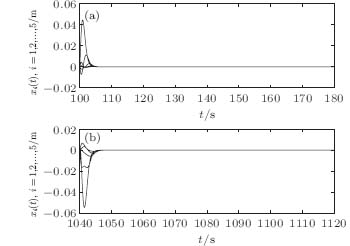
| Fig. 3. The evolution curves of relative displacements between the two neighboring cars in [100 s, 180 s] a and [1040 s, 1120 s] b. |
| |